Créé par un Adhérent, Claude
Voiture automatique avec l’utilisation d’Arduino
Auteur : Claude Vandelle
Mon projet est la réalisation d’une voiture à 4 roues motrices pilotée par l’Arduino et l’utilisation d’une imprimante 3D pour faire la carrosserie.
Etape 1 : réalisation du prototype de petite voiture (châssis et programmation logique de l’arduino)
Dans un premier temps j’ai réalisé le châssis à partir d’éléments achetés sur internet. Chaque roue a son propre moteur et une roue codeuse lue via une fourche optique pour faire un asservissement en vitesse du moteur.
Code de l’arduino

je commande les moteurs avec un module « DRV298N» , (Pour le moment, les moteurs des roues d’un même coté sont branchés ensemble, je vais rajouter un 2e module afin de commander les 4 roues séparément)
Le module DRV298N est utilise car l’arduino ne fourni pas assez de puissance pour commander les roues. J’ai mis une alimentation 9v séparée pour les moteurs.
Les changements de direction de la voiture sont assurés en faisant varier les vitesses de roues d’un coté par rapport à l’autre.

Les roues codeuses permettent de mesure la vitesse réelle par rapport à la vitesse de consigne. J’utilise la librairie Arduino PID (contrôle de vitesse « proportionnel, intégral, dérivé » pour asservir les moteurs => explications du fonctionnement d’un PID voir page Wikipedia
J’ai installé des détecteurs ultrasons HC-SR04 (2 à l’avant, 2 à l’arrière) pour faire la détection d’obstacle.

ultrasons HC-SR04
J’ai installé des détecteurs ultrasons HC-SR04 (2 à l’avant, 2 à l’arrière) pour faire la détection d’obstacle.
Lorsque je détecte un obstacle à plus de 50cm, j’essaye de l’éviter en virant à droite ou à gauche suivant le lieu de détection de l’obstacle.
Lorsque je suis à moins de 10cm de l’obstacle, j’arrête l’avance et recule en virage jusqu’à que l’obstacle ne soit plus détecté (les détecteurs arrières servent alors pour éviter un obstacle éventuel qui serait derrière).
Afin de brancher les 4 détecteurs ultrasons, les commandes des moteurs et les lecteurs optique de roues codeuses sur l’arduino, j’ai du augmenter le nombre de connexions E/S disponibles en ajoutant une extension I2C PCF8574

extension I2C PCF8574
J’ai également ajouté un module bluetooth ZS040 afin de communiquer avec le PC (debug sans cable, récupération des informations des roues codeuses)

extension I2C PCF8574
Reste à faire :
Grâce aux roues codeuses je devrais être capable de définir la relation entre le nombre d’impulsions lues sur les roues codeuses et la distance parcourue. Cela devrait me permettre de cartographier l’espace parcouru. L’idée est de simuler le fonctionnement d’un aspirateur automatique en analysant et cartographiant l’espace disponible afin de m’assurer que l’aspirateur couvre bien toute la surface.
Etape 2 : réalisation de la coque de la petite voiture en impression 3D
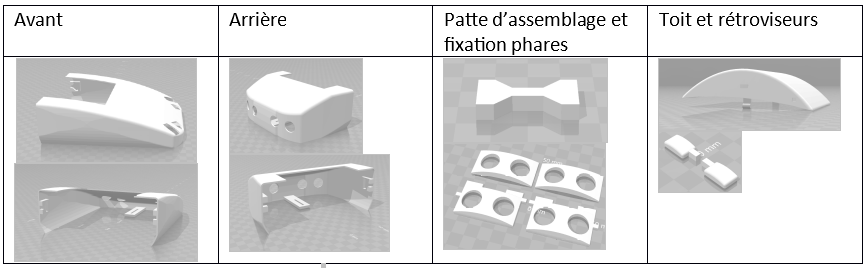
Le plus compliqué a été de faire le design de la carrosserie avec une belle esthétique. En effet, les roues du châssis étant très rapprochées (par rapport à une voiture normale). j’ai du allonger le design pour que l’esthétique soit acceptable (la voiture mesure 24cm et la carrosserie fait 10cm de plus).
J’ai utilisé les logiciels Openscad et Blender pour ce design. J’ai du découper l’ensemble en plusieurs morceaux pour tenir compte de la capacité de l’imprimante 3D
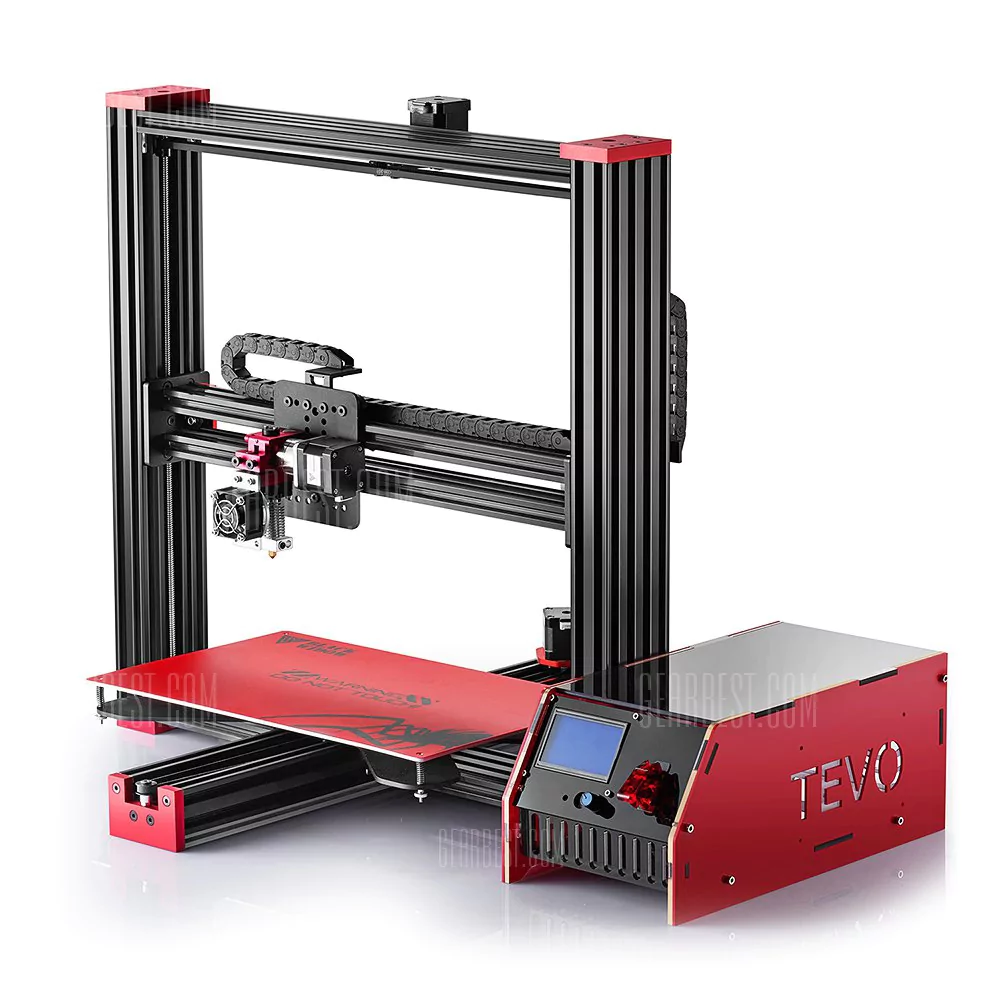
J’ai utilisé l’imprimante TEVO Black du LOREM avec du fil PLA bleu (pour la coque) et blanc (pour le toit)
Design 3D :
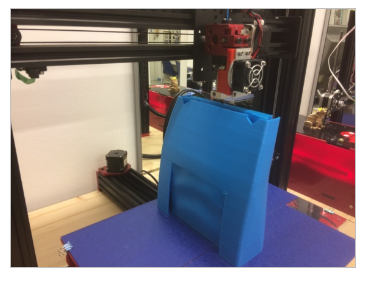
Impression en cours de la partie avant sur l’imprimante 3D au LOREM:
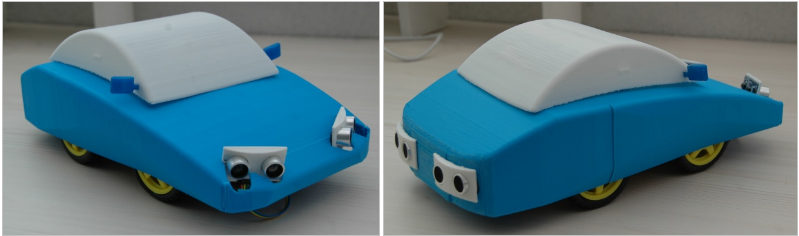
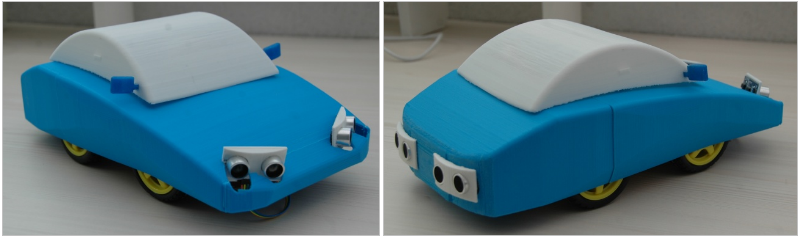
Voiture terminée :
(mais je dois encore retravailler le système de fixation des phares car il faut qu’ils soient bien orientés pour une bonne détection des obstacles)
Code de l’arduino :
/*
Ce programme permet de faire fonctionner automatiquelent la petite voiture en
– déviant la trajectoire quand un obstacle est détecté à 50cm à gauche ou a droite et infléchir la direction dans le sens opposé à l’obstacle
– détectant un obstacle proche (10cm) et en declenchant une manoeuvre de recul et de rotation pour repartir
– ajout de 2 détecteurs ultrasons arrière pour quand la voiture recule
J’ai transféré sur le module I2C certaines commandes de moteur pour utiliser les IO de l’arduino pour les détectuers ultrasons supplémentaires
connexion série via le module bluetooth HC06 (branché sur port 0(RX) et 1 TX (arduino) en croisé (TX HC06 => RX arduino (1), RX HC06 => TX Arduino((1)
*/
#include <NewPing.h> // librairie pour les détecteurs ultrasons
#include <PCF8574.h> // librairie pour le module d’extension I2C
PCF8574 expander1 ; // créé une instance expander1 à partir de la classe PCF8574 (module d’extension I2C)
// adresse du bus 8574A avec les 3 cavaliers A0,A1 et A2 sur position « -« , valeur 56 en hexadecimal soit 0x38 en hexa, valeur utilisée dans la commande init
// Pins utilisées (utilisation de l’expander1 pour les moteurs
// allocation des pins PWM arduino utilisées pour connecter le controle de vitesse moteur (enA et enB)
// les roues d’un même coté sont branchées sur le même moteur
// moteur un
int enA = 5; // permet de définir la vitesse
int exp_in1 = 0; // en jumelage avec int2 permet de définir le sens de rotation (avant in1= HIGH, in2= LOW), connexion sur expander
int exp_in2 = 1; // en jumelage avec int1 permet de définir le sens de rotation (arriere in1= LOW, in2 = HIGH , connexion sur expander
// moteur deux
int enB = 6;
int exp_in3 = 2; // connexion sur expander
int exp_in4 = 3; // connexion sur expander
int nbImpulsion_d = 0; // sert à compter les impulsions lues par la fourche
int nbImpulsion_g = 0; // roues gauches: idem que pour roues droites
int memoire_impulsions_d = 0; // sert à accumuler les impulsions lues par la fourche (permet de correler à la vitesse et à la distance parcourue)
int memoire_impulsions_g = 0; // idem pour roues gauche
int temps_reference_d =0;
int temps_reference_g =0;
int avance = 0; // vitesse d’avance de la voiture (commande moteur)
int droitegauche = 0; // permet de controler le virage à droite (si positif) ou à gauche (si négatif)
int rouesdroites = 0; // calcul de la vitesse des roues droites en fonction de l’avance et du virage éventuel (le virage se fait en accélérant les roues d’un coté par rapport à l’autre)
int rouesgauches = 0; // calcul de la vitesse des roues droites en fonction de l’avance et du virage éventuel
int distance_obstacle_ad = 0; //distance obstacle avant droit
int distance_obstacle_ag = 0; //distance obstacle avant gauche
int distance_obstacle_ard = 0; //distance obstacle arrière droit
int distance_obstacle_arg = 0; //distance obstacle arrière gauche
const int fourchePin_d = 2; //Sortie de la fourche droite (mesure vitesse roue droite)
const int fourchePin_g = 3; //Sortie de la fourche gauche (mesure vitesse roue gauche)
const int TURNDISTANCE = 50; // définit la distance mini de détection d’un obstacle pour lancer la procédure d’évitemment
const int MINDISTANCE = 10; // distance minimum pour enclancher l’arrêt de la voiture et le recul
const int LOWSPEED = 70; // vitesse lente pour manoeuvre lors de la détection d’obstacle
const int HIGHSPEED = 100; // vitesse rapide quand aucun obstacle n’est détecté
// 1er détecteur
int TRIGGER_PIN_ad = 10; // Arduino trigger pin avant-droit pour le senseur ultrasons (envoi d’impulsion)
int ECHO_PIN_ad = 11; // Arduino Echo pin avant-droit pour le senseur ultrasons (lecture retour d’impulsion)
int MAX_DISTANCE_ad = 200 ; // Distance Maximum de ping en centimetres. (donc on ne tient pas compte des obstacles détectés au delà de cette valeur) (valeur pour ce parametre et ce type de senseur 400-500cm.)
// 2e détecteur
int TRIGGER_PIN_ag = 12; // idem au dessus pour avant gauche.
int ECHO_PIN_ag = 13; // idem au dessus pour avant gauche.
int MAX_DISTANCE_ag = 200 ; // idem au dessus pour avant gauche.
// 3e détecteur
int TRIGGER_PIN_ard = 4; // idem au dessus pour arriere droit.
int ECHO_PIN_ard = 7; // idem au dessus pour arriere droit.
int MAX_DISTANCE_ard = 50 ; // idem au dessus pour arriere droit.
// 4e détecteur
int TRIGGER_PIN_arg = 8; /// idem au dessus pour arriere gauche.
int ECHO_PIN_arg = 9; // idem au dessus pour arriere gauche.
int MAX_DISTANCE_arg = 50 ; // idem au dessus pour arriere gauche.
NewPing sonar_ad(TRIGGER_PIN_ad, ECHO_PIN_ad, MAX_DISTANCE_ad); // création de l’instance sonar pour le détecteur avant droit
NewPing sonar_ag(TRIGGER_PIN_ag, ECHO_PIN_ag, MAX_DISTANCE_ag); // création de l’instance sonar pour le détecteur avant gauche
NewPing sonar_ard(TRIGGER_PIN_ard, ECHO_PIN_ard, MAX_DISTANCE_ard); // création de l’instance sonar pour le détecteur arrière droit
NewPing sonar_arg(TRIGGER_PIN_arg, ECHO_PIN_arg, MAX_DISTANCE_arg); // création de l’instance sonar pour le détecteur arrière gauche
void comptageDUneImpulsion_d() {
nbImpulsion_d ++; // procédure d’incrémentation du compteur d’impulsions droit
}
void comptageDUneImpulsion_g() {
nbImpulsion_g ++; // procédure d’incrémentation du compteur d’impulsions gauche
}
// ce programme envoi des PING toutes les 50ms afin de détecter les obstacles éventuels
// en cas de détection il retourne les distances en cm des obstacles détectés
void detection_obstacle() {
delay(50); // PING toutes les 50ms (environ 20 pings/sec).
unsigned int uS1 = sonar_ad.ping(); // envoi du ping, récupère le temps d’écho en microseconds (uS1).
distance_obstacle_ad = uS1 / US_ROUNDTRIP_CM; // detection coté avant droit, calcul de la distance en fonction du temps de retour d’écho (valeur = 0 si en dehors de la zone de détection)
unsigned int uS2 = sonar_ag.ping(); // idem ci-dessus pour détecteur avant gauche (uS2).
distance_obstacle_ag = uS2 / US_ROUNDTRIP_CM; // idem ci-dessus pour détecteur avant gauche
unsigned int uS3 = sonar_ard.ping(); // idem ci-dessus pour détecteur arriere droit (uS3).
distance_obstacle_ard = uS3 / US_ROUNDTRIP_CM; // idem ci-dessus pour détecteur arriere droit
unsigned int uS4 = sonar_arg.ping(); // idem ci-dessus pour détecteur arriere gauche (uS4).
distance_obstacle_arg = uS4 / US_ROUNDTRIP_CM; // idem ci-dessus pour détecteur arriere gauche
/*
Serial.print(« Ping: « ); //(code utilisé pour vérifier le fonctionnement des détecteurs)
Serial.print(« distance obstacle avant droit: » );
Serial.print(distance_obstacle_ad);
Serial.println( » cm »);
Serial.print(« distance obstacle avant gauche: » );
Serial.print(distance_obstacle_ag);
Serial.println( » cm »);
Serial.print(« distance obstacle arriere droit: » );
Serial.print(distance_obstacle_ard);
Serial.println( » cm »);
Serial.print(« distance obstacle arriere gauche: » );
Serial.print(distance_obstacle_arg);
Serial.println( » cm »);
*/
}
/* programme de commande des moteurs, avance (vitesse avant si positif, vitesse de recul si négatif), droitegauche (positif pour tourner à fdroite, négatif pour tourner à gauche)
– avance peut varier de -255 à +255
– droitegauche peut varier de -40 à +40
*/
void commande_moteur(int avance, int droitegauche) {
if (avance >= 0 ) { // moteur marche avant
expander1.digitalWrite(exp_in1, HIGH);
expander1.digitalWrite(exp_in2, LOW);
expander1.digitalWrite(exp_in3, HIGH);
expander1.digitalWrite(exp_in4, LOW);
}
else { // moteur marche arrière
expander1.digitalWrite(exp_in1, LOW);
expander1.digitalWrite(exp_in2, HIGH);
expander1.digitalWrite(exp_in3, LOW);
expander1.digitalWrite(exp_in4, HIGH);
}
if (droitegauche > 0) { //tourner à droite, les roues gauches (enA) vont plus vite
// vitesse basé sur le parametre « avance » (range 0-255) corrigé en fonction de la direction
rouesdroites = abs (avance);
rouesgauches = abs(avance) + abs(droitegauche);
}
else { //tourner à gauche, les roues droites (enB) vont plus vite
rouesdroites = abs(avance) + abs(droitegauche) ;
rouesgauches = abs (avance);
}
analogWrite(enA, rouesgauches);
analogWrite(enB, rouesdroites);
}
void setup() {
// définit les PINs moteur et détecteurs ultrasons en entrée ou sortie
pinMode(enA, OUTPUT); // commande moteur 1
pinMode(enB, OUTPUT); // commande moteur 2
pinMode (ECHO_PIN_ad, INPUT);
pinMode (TRIGGER_PIN_ad, OUTPUT);
pinMode (ECHO_PIN_ag, INPUT);
pinMode (TRIGGER_PIN_ag, OUTPUT);
pinMode (ECHO_PIN_ard, INPUT);
pinMode (TRIGGER_PIN_ard, OUTPUT);
pinMode (ECHO_PIN_arg, INPUT);
pinMode (TRIGGER_PIN_arg, OUTPUT);
pinMode(A4, INPUT); // Entrée bus I2C sur l’arduinio
pinMode(A5, INPUT); // Entrée bus I2Csur l’arduinio
digitalWrite(A4, LOW); // état démarrage bus I2C
digitalWrite(A5, LOW); // état démarrage bus I2C
Serial.begin(9600); //connection au port série pour debug
expander1.begin(0x38); // démarrage du bus I2C pour module d’extension
expander1.pinMode(exp_in1, OUTPUT); // commande moteur 1 en sortie
expander1.pinMode(exp_in2, OUTPUT); // commande moteur 1 en sortie
expander1.pinMode(exp_in3, OUTPUT); // commande moteur 2 en sortie
expander1.pinMode(exp_in4, OUTPUT); // commande moteur 2 en sortie
pinMode(fourchePin_d, INPUT); //fourche optique droite de mesure de vitesse en entrée
pinMode(fourchePin_g, INPUT); //fourche optique gauche de mesure de vitesse en entrée
Serial.println(« Fourche optique – detection de presence »);
attachInterrupt(digitalPinToInterrupt(2), comptageDUneImpulsion_d, CHANGE); // comptage d’impulsion droit via le mode interrupt
attachInterrupt(digitalPinToInterrupt(3), comptageDUneImpulsion_g, CHANGE); // comptage d’impulsion gauche via le mode interrupt
}
void loop() {
detection_obstacle();
if (distance_obstacle_ad <= MINDISTANCE && distance_obstacle_ad != 0 || distance_obstacle_ag <= MINDISTANCE && distance_obstacle_ag != 0 )
{ // arret quand on se rapproche trop près d’un obstacle
expander1.digitalWrite(exp_in1, LOW);
expander1.digitalWrite(exp_in2, LOW);
expander1.digitalWrite(exp_in3, LOW);
expander1.digitalWrite(exp_in4, LOW);
// on recule jusqu’à que l’on ne détecte plus l’obstacle et on tourne à droite
do {
detection_obstacle();
commande_moteur(-50, 200);
}
while (distance_obstacle_ad <= 20 || distance_obstacle_ag <= 20 || ( distance_obstacle_ard > 5 && distance_obstacle_arg > 5));
// on recule jusquà etre à 20cm de l’obstacle sauf si il y a un obstacle arriere à moins de 5cm
}
else {// on continue à avancer
detection_obstacle();
if (distance_obstacle_ad < TURNDISTANCE || distance_obstacle_ag < TURNDISTANCE ) {
if (distance_obstacle_ad < distance_obstacle_ag) {
commande_moteur(LOWSPEED, -100); // on inflechit la trajectoire vers la gauche }
else {
commande_moteur(LOWSPEED, 100); //on infléchit la trajectoire vers la droite}
}
else {
commande_moteur(HIGHSPEED, 00);}
}
Serial.print (« impulsions droite: « );
Serial.print (nbImpulsion_d);
Serial.print ( » impulsions gauche: « );
Serial.println (nbImpulsion_g);
}
Commentaires récents